Roboter
2005
Leo Peschta
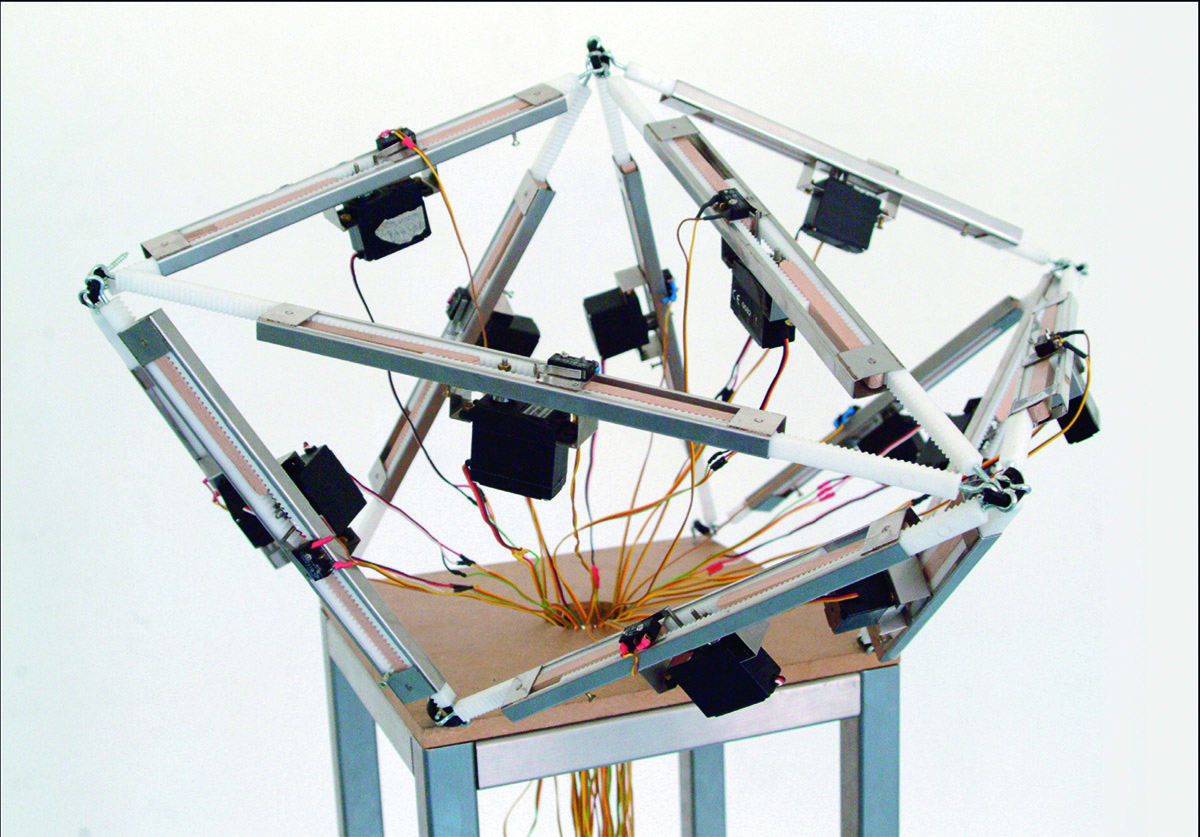
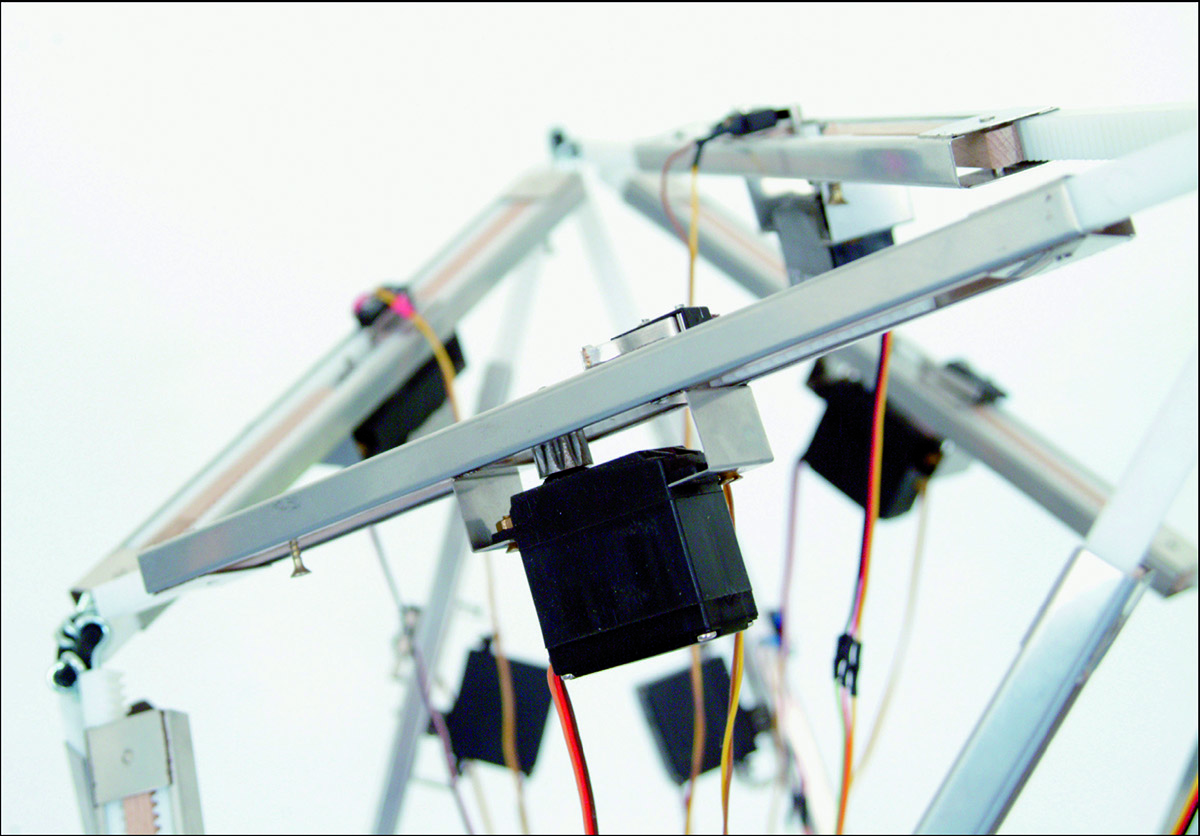
Die Skulptur „E-13” erinnert in Aufbau
und Erscheinung zuerst an die radikalenVisionen
hybrider, beweglicher Architekturen wie
sie schon Constant ersehnte. Bestehend aus 13
steuerbaren Elementen, die mit einem akustischen
Sensor rückkoppeln passt sich „E-13”
den Veränderungen seiner Umwelt dynamisch
an. Ein Mikrofon nimmt die Geräusche in
seiner Umgebung auf und ermittelt anhand
eines Algorithmus den Grundklang dieser.
Kurze abweichende Klänge werden durch Interpolation
ausgeschlossen. Jede Strebe reagiert
auf spezielle Frequenzen des Spektrums der
Aufnahme.
Das bedeute aber das die Skulptur in
keinem Raum gleich aussehen wird, und sich
ihre Form auch abhängig der von der Zeit
ändert (eine Galerie-Raum klingt Nachts
anders als tagsüber).
Neben den Verweisen auf die Architekturtheorie
stellt sich der Roboter gleichfalls in
die Tradition kinematischer Skulpturen, in
dem er seine eigene Form von seiner Umgebung
abhängig macht, gleich wie sich zum
Beispiel die Skulpturen Rickey’s ganz dem
Wind ausliefern.